

| LTPDA Toolbox™ | contents | |
Here we will simulate the LPF system using the internal noise generator. In Topic 4 you will see how to inject signals into the simulation.
You can set up the simulation to simulate a single noise source for LPF by specifying a single input name and a value for the variance of that noise. Let's suppose we want to simulate the effect of interferometer readout noise on the X1 interferometer and look how that appears in the two longitudinal interferometer outputs. Here's how to do it:
% Build the default version of the LPF model
lpf = ssm(plist('built-in', 'LPF'));
% Define the simulation plist for a 10000 sample simulation
simPlist = plist(...
'CPSD Variable Names', 'DIST_IFO_READOUT_NOISE.x1', ...
'CPSD', 1, ...
'Return outputs', {'IFO.x1', 'IFO.x12', 'DIST_IFO_READOUT.x1'}, ...
'Nsamples', 10000 ...
);
% Run the simulation
out = simulate(lpf, simPlist);
% Plot on subplots
iplot(out, plist('arrangement', 'subplots'));
% Or, unpack them and plot individually
[o1, o12, noise] = unpack(out);
iplot(o1)
iplot(o12)
iplot(noise)
% Plist for configuring the PSD estimator
psdPlist = plist(...
'navs', 16, ...
'scale', 'ASD', ...
'order', 1, ...
'win', 'BH92' ...
);
% Estimate the PSD of each output
[S_o1, S_o12, S_noise] = psd(o1, o12, noise, psdPlist);
% Plot the results
iplot(S_o1, S_o12, S_noise);
% Note: you can also use the matrix/psd method
S_out = psd(out, psdPlist);
% Unpack them and plot individually
[S_o1, S_o12, S_noise] = unpack(S_out);
iplot(S_o1, S_noise)
iplot(S_o12)The ssm/simulate method has two possible noise configuration inputs. Both use the internal noise generator. The difference is simply in the scaling:
Simulating with more than one noise source requires setting of the inputs and (co-)variance just as in the single noise case. Suppose we want to activate the readout noise in both the X1 and X12 IFO. And further suppose that these two readout noises should be correlated. To simulate this, we should do:
% Define the simulation plist for a 100000 sample simulation
simPlist = plist(...
'CPSD Variable Names', {'DIST_IFO_READOUT_NOISE.x1', 'DIST_IFO_READOUT_NOISE.x12'}, ...
'CPSD', [1 0.5; 0.5 1], ...
'Return outputs', {'IFO.x1', 'IFO.x12', 'DIST_IFO_READOUT.x1', 'DIST_IFO_READOUT.x12'}, ...
'Nsamples', 100000 ...
);
% Run the simulation
out = simulate(lpf, simPlist);
% Unpack the signals from the simulation output matrix
[o1, o12, x1noise, x12noise] = unpack(out);
% Estimate PSD of the measured outputs
[S_o1, S_o12] = psd(o1, o12, psdPlist);
% Estimate CPSD of the measured outputs
S_o1o12 = cpsd(o1, o12, psdPlist);
% Estimate COHERENCE of the measured outputs
C_o1o12 = cohere(o1, o12, psdPlist);
% Plot results
iplot(S_o1, S_o12, abs(sqrt(S_o1o12)));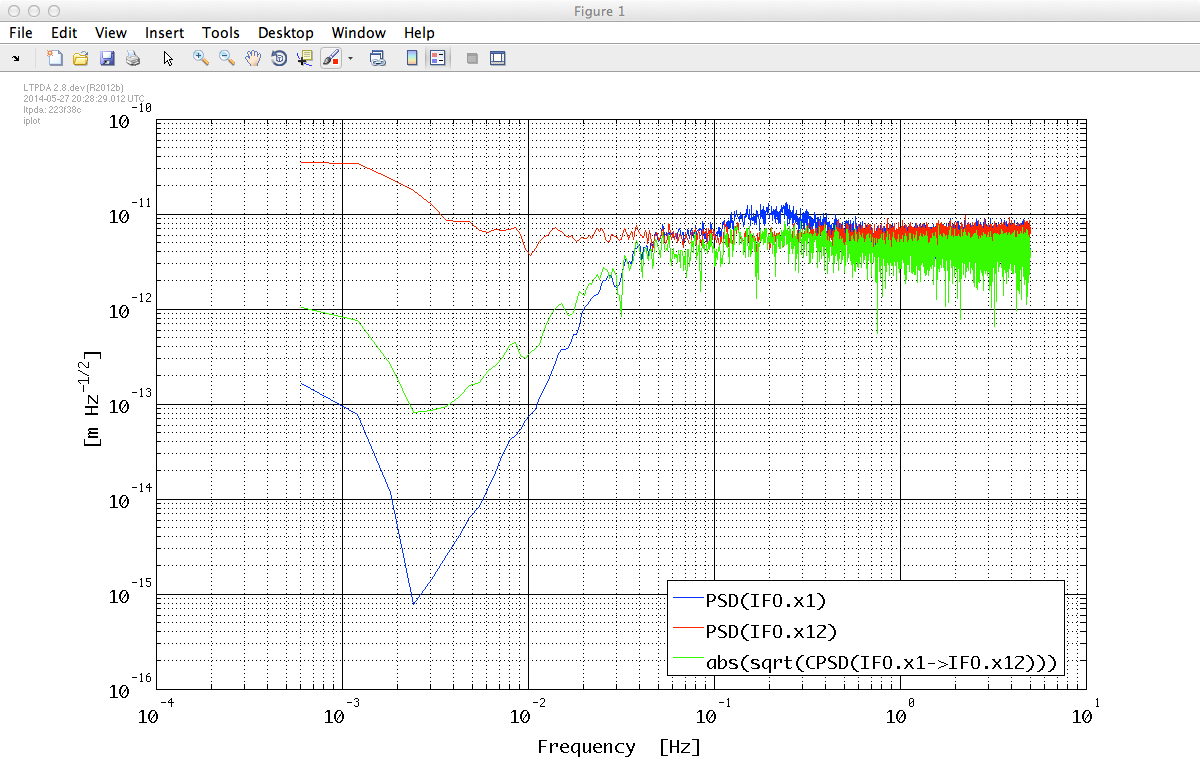
Simulating with all the noise sources on works just the same as the above examples. However, there are 95 noise inputs to the LPF model and specifying each of them would be quite painful. So, we have a shortcut for doing this. There is an ssm method called generateCovariance which creates a suitable covariance matrix for you as well as a list of the all the noise input port names. The covariance matrix it generates is diagonal and as such all input noises are specified as uncorrelated. To use this method in conjunction with ssm/simulate you can follow the example. The covariance matrix is included in a plist object, together with other informations, and as such it must be extracted from the plist to be passed as a numeric parameter.
% Create a covariance matrix and port list sized for our LPF model
cov_matrix = lpf.generateCovariance();
% Define the simulation plist for a 100000 sample simulation
simPlist = plist(...
'CPSD Variable Names', cov_matrix.find('names'), ...
'CPSD', cov_matrix.find('cov'), ...
'Return outputs', {'IFO.x1', 'IFO.x12', 'DFACS.sc_x', 'DFACS.tm2_x'}, ...
'Nsamples', 100000 ...
);
% Run the simulation
out = simulate(lpf, simPlist);
% Unpack the signals from the simulation output matrix
[o1, o12, F_cmd_X, F_cmd_x2] = unpack(out);
% Plot the IFO outputs and commanded forces along x
iplot(o1, o12);
iplot(F_cmd_X, F_cmd_x2);
% Estimate PSD of the measured outputs
[S_o1, S_o12, S_F_cmd_X, S_F_cmd_x2] = psd(o1, o12, F_cmd_X, F_cmd_x2, psdPlist);
% Plot results
iplot(S_o1, S_o12);
iplot(S_F_cmd_X, S_F_cmd_x2);| |
Simulating capacitive actuation noise | Changing system parameters | |
©LTP Team