

| LTPDA Toolbox™ | contents | |
Let's begin with a simple example, namely the harmonic oscillator. The system can be built easily, specifying the values for the key parameters (mass, spring constant, viscous damping coefficient):
% Build a Harmonic Oscillator model % Physical parameters m = .1; % mass: 0.1 kg k = 1e-2; % spring constant: 1e-2 N / m vbeta = 1e-3; % viscous damping coefficient: 1e-3 N s / m % Definition plist buildPlist = plist(... 'built-in', 'HARMONIC_OSC_1D', ... 'm', m, ... 'vbeta', vbeta, ... 'k', k ... ); % Build the ssm model harm_osc = ssm(buildPlist);
%% Look at the model details
harm_osc.viewDetails
%% Check if the model is continuous
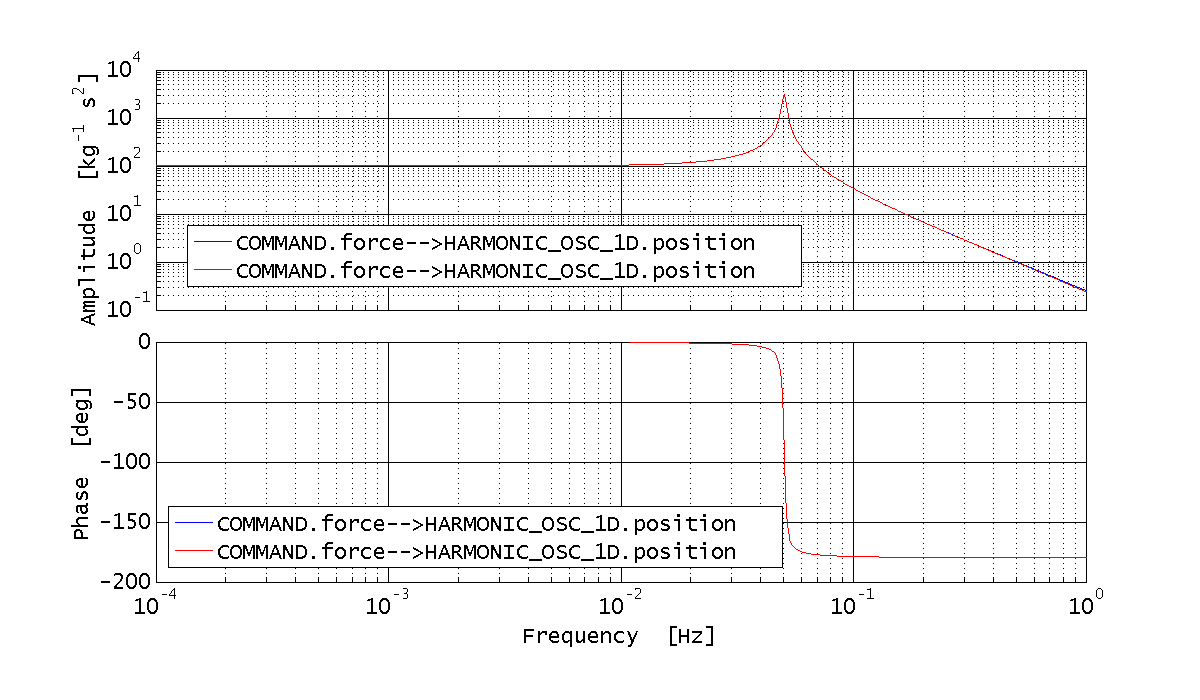
harm_osc.timestepNow we want to calculate the system transfer function of the input to the outputs, in order to estimate the effect of the sources. In order to do that, we can call the ssm/bode method, specifying the input port, the output port, and the frequency range. Here is an example, where we look at the response of the harmonic oscillator mass position to the application of an external force, in the range from 0.1 mHz t 1 Hz:
%% Calcolate the bode response from force to displacement for the continuous system forceBodePlist = plist(... 'inputs', 'COMMAND.force', ... 'outputs', 'HARMONIC_OSC_1D.position', ... 'f', logspace(-4, 0, 1000) ... % from 0.1mHz to 1Hz ); bode_output = bode(harm_osc, forceBodePlist); harm_osc_cont_resp_force = bode_output.unpack();
| NOTE: The output of bode is a matrix object. The single response we want (1 input to 1 output) is represented by the single ao inside the output matrix. So we unpack that single object from the matrix. |
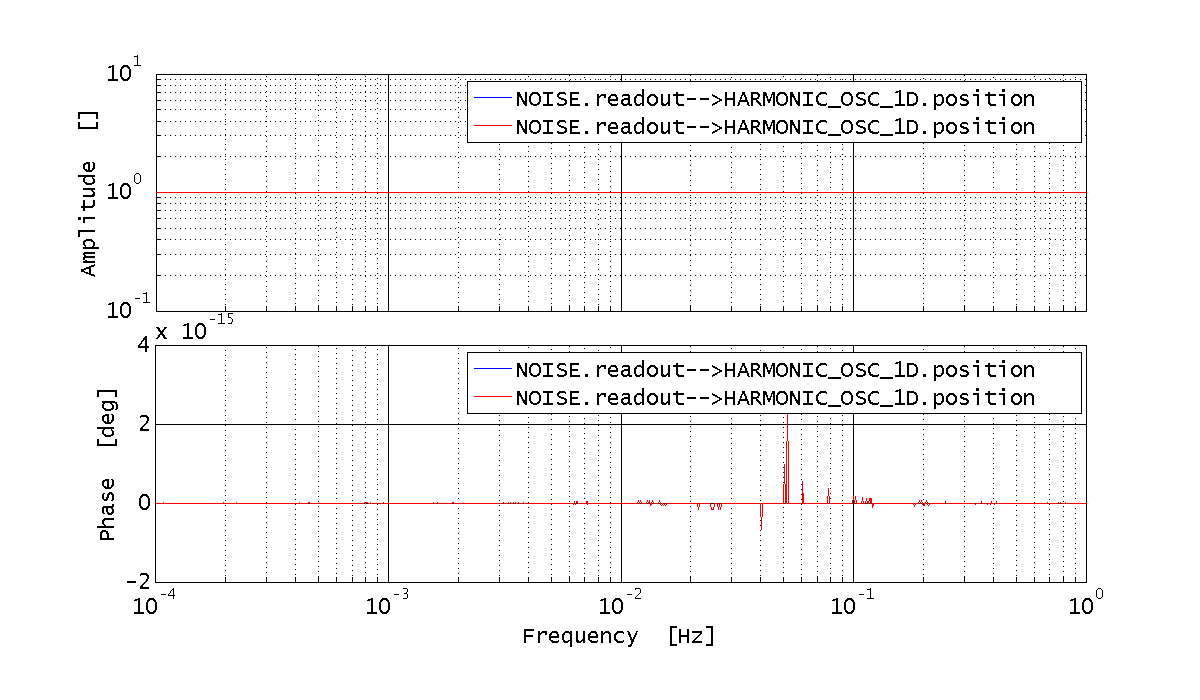
%% Calcolate the bode response from readout noise to displacement for the continuous system readoutBodePlist = plist(... 'inputs', 'NOISE.readout', ... 'outputs', 'HARMONIC_OSC_1D.position', ... 'f', logspace(-4, 0, 1000) ... % from 0.1mHz to 1Hz ); bode_output = bode(harm_osc, readoutBodePlist); harm_osc_cont_resp_readout = bode_output.unpack();
%% Discretize the system to be simulated at 10 Hz
timestep = 0.1;
harm_osc_discrete = harm_osc.modifyTimeStep(timestep);
% Calculate the bode response from force to displacement for the discrete system bode_output = bode(harm_osc_discrete, forceBodePlist); harm_osc_disc_resp_force = bode_output.unpack(); % Calculate the bode response from readout noise to displacement for the discrete system bode_output = bode(harm_osc, readoutBodePlist); harm_osc_disc_resp_readout = bode_output.unpack(); % Compare the transfer functions for the discrete and continuous case plot_plist = plist('linestyles', {'-', '--'}); iplot(harm_osc_cont_resp_readout, harm_osc_disc_resp_readout, plot_plist); iplot(harm_osc_cont_resp_force, harm_osc_disc_resp_force, plot_plist);
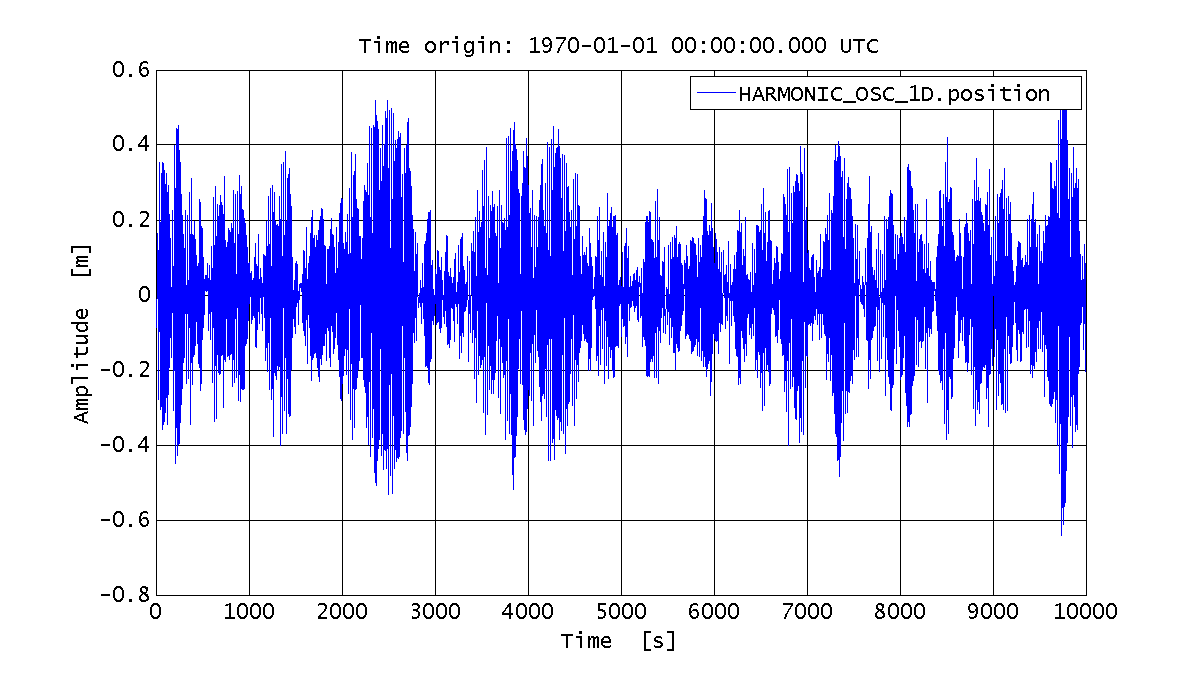
Let's assume we only want to simulate the effect of the external force noise, so we simulate a single noise source. We can do that by specifying a single input name and a value for the CPSD of that noise source:
%% Simulate the system behavior: only force noise % Simulation configuration plist simPlist_force = plist(... 'CPSD Variable Names', 'COMMAND.force', ... 'CPSD', 1e-6, ... 'Return outputs', {'HARMONIC_OSC_1D.position'}, ... 'Nsamples', 100000 ... ); % Launch the simulation sim_output = harm_osc_discrete.simulate(simPlist_force); % Extract the AO with the postion data out_force = sim_output.unpack(); % Plot the results iplot(out_force)
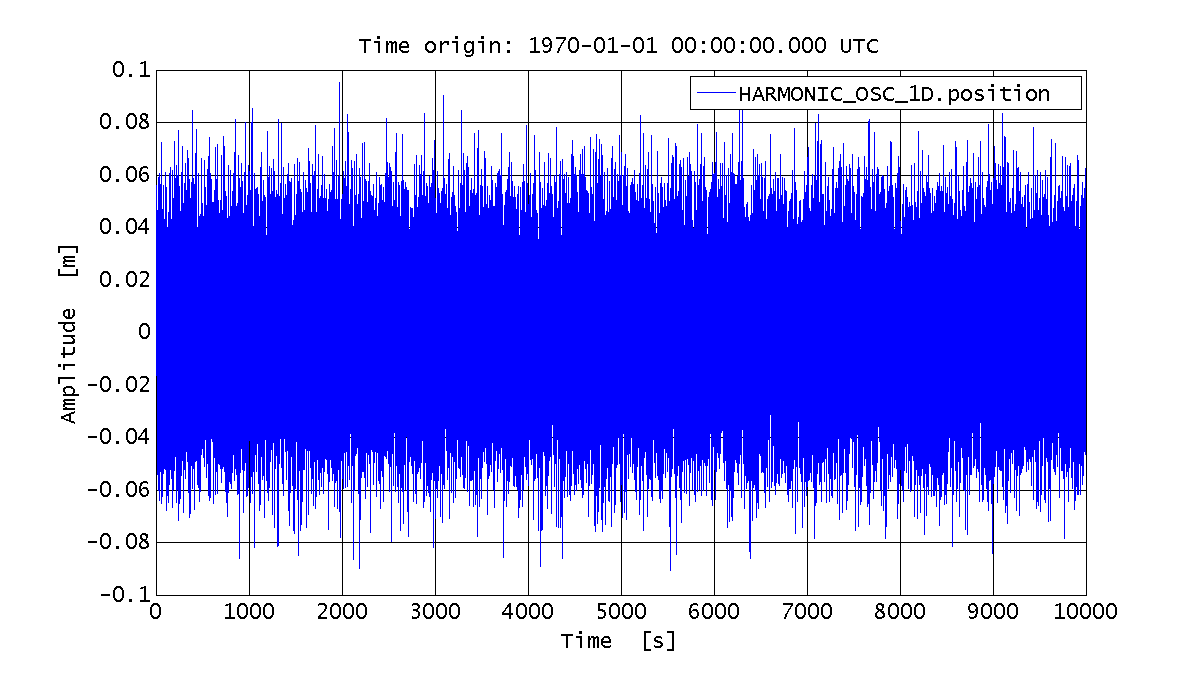
Similarly, let's assume we only want to simulate the effect of the readout noise, so we simulate a single noise source. We can do that by specifying a single input name and a value for the CPSD of that noise source:
%% Simulate the system behavior: only readout noise % Simulation configuration plist simPlist_readout = plist(... 'CPSD Variable Names', 'NOISE.readout', ... 'CPSD', 0.01, ... 'Return outputs', {'HARMONIC_OSC_1D.position'}, ... 'Nsamples', 100000 ... ); % Launch the simulation sim_output = harm_osc_discrete.simulate(simPlist_readout); % Extract the AO with the postion data out_readout = sim_output.unpack(); % Plot the results iplot(out_readout)
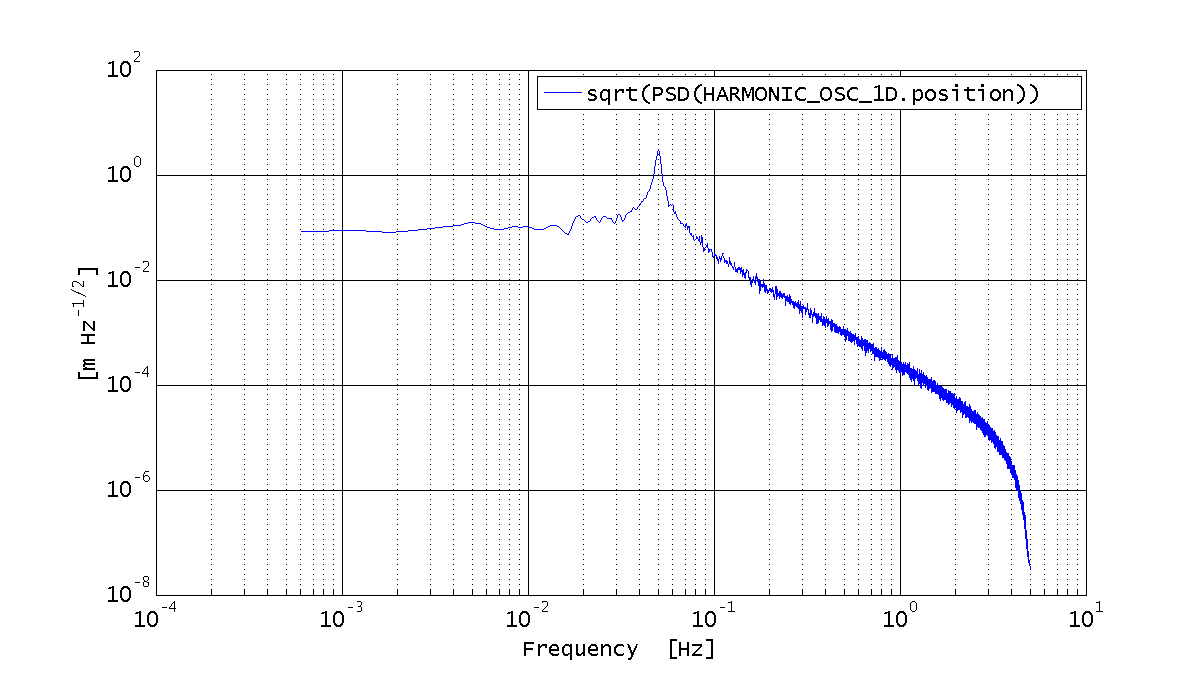
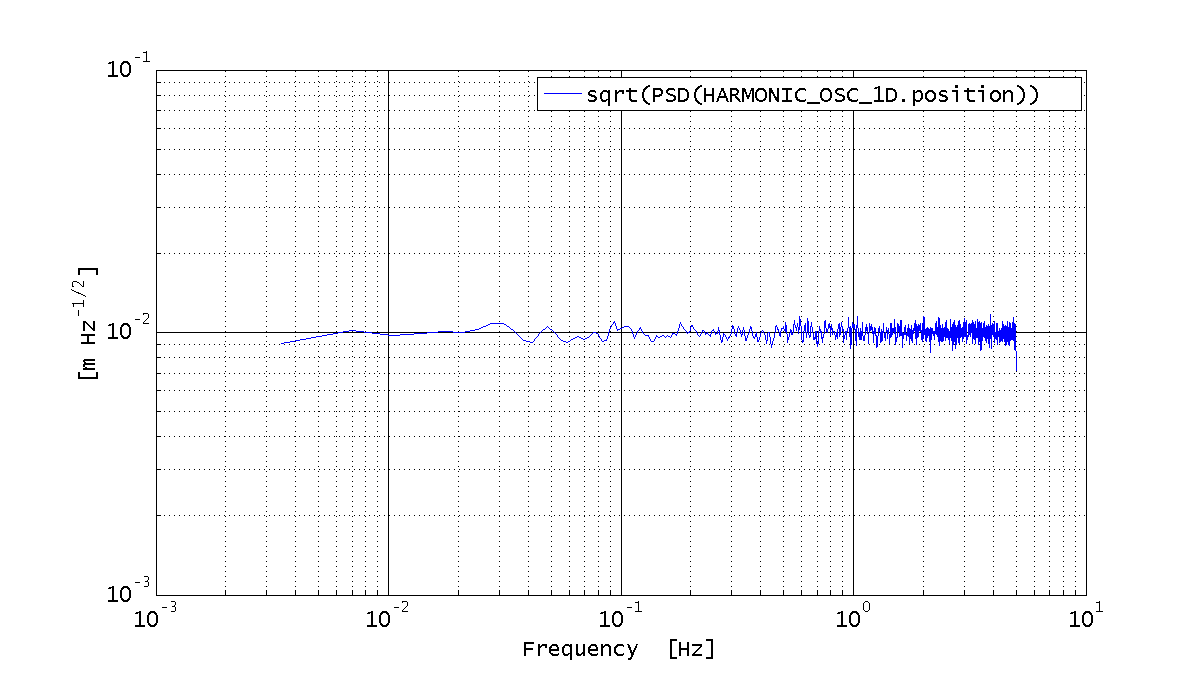
Eventually, we want to estimate the PSD of the displacement in the two cases. Just for curiosity, we change the number of averages in the two cases.
%% Estimate the PSD % PSD estimation configuration plist psdPlist = plist(... 'scale', 'PSD', ... 'order', 1, ... 'win', 'BH92' ... ); % Estimate the PSD S_out_force = out_force.psd(psdPlist.pset('navs', 16)); S_out_readout = out_readout.psd(psdPlist.pset('navs', 100)); % Plot the ASD (sqrt(PSD)) iplot(sqrt(S_out_readout)); iplot(sqrt(S_out_force));
| |
Simulating noise | Simulating capacitive actuation noise | |
©LTP Team