

| LTPDA Toolbox™ | contents | |
State-space models in LTPDA are encapsulated by the ssm class. Building state-space models by hand, while possible, is complicated and beyond the scope of this training session. The most useful class constructor we can use for building ssm objects is the one that builds from built-in models.
For the purposes of this training session, we can treat the resulting state-space models as black boxes. They have inputs and outputs and describe a system in terms of a state-space realisation of the system's dynamical response. More details about the implementation is provided in the main LTPDA user manual.
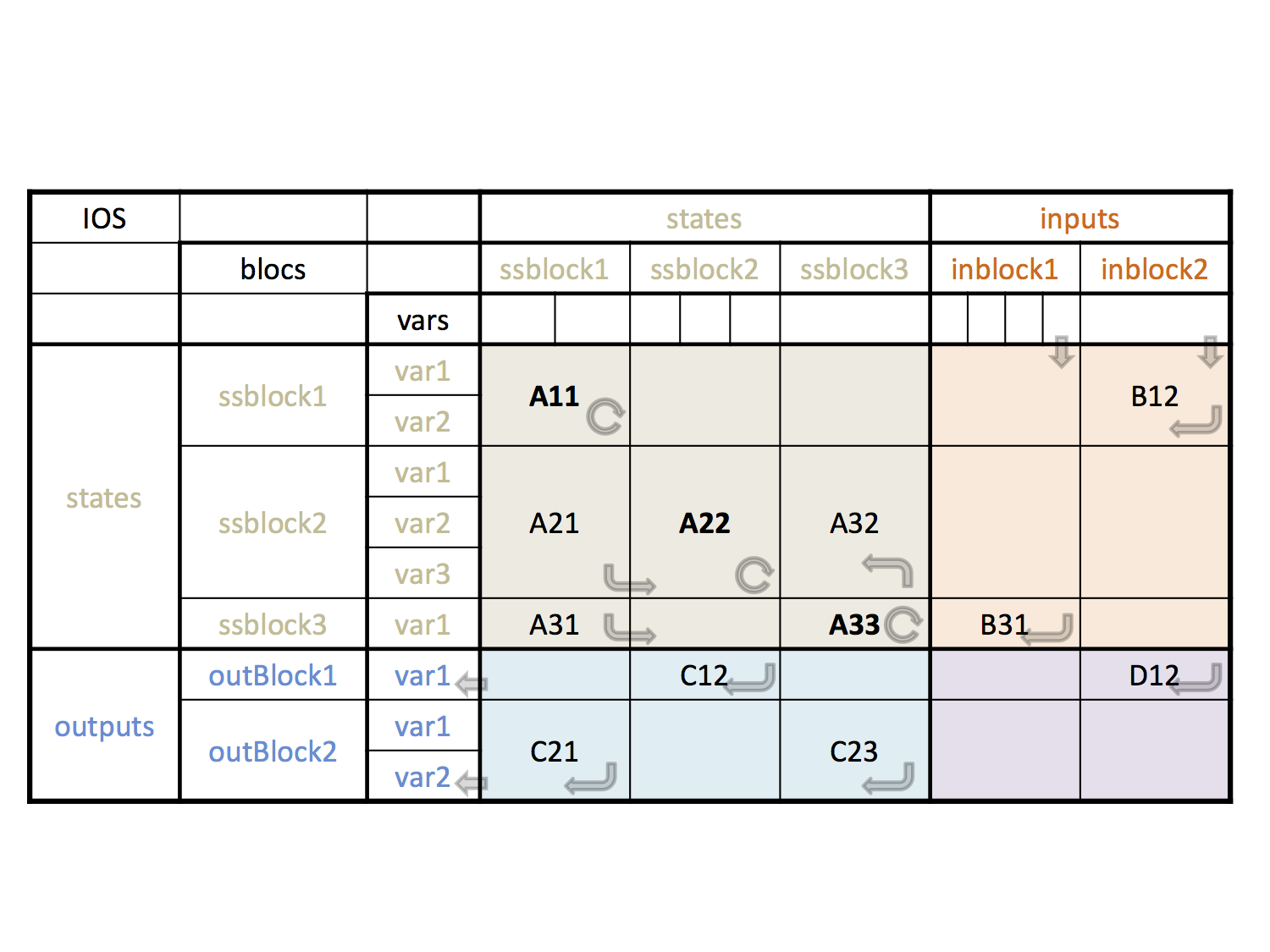
State-space model objects in LTPDA are structured in the following way. Each model has a number of
LTPDA comes with some example built-in models for the ssm class. One such example is a simple 1D harmonic oscillator. To build this model we use the 'built-in' model constructor of the ssm class. (Note: the 'built-in' model constructor can be used for all the different user classes in LTPDA.)
To see a list of the ssm built-in models available to you, you can do
% Get a list of available built-in ssm models
ssm.getBuiltInModels
% Use the model browser
LTPDAModelBrowser% Build a Harmonic Oscillator model sys = ssm(plist('built-in', 'HARMONIC_OSC_1D'))
% View details of the model
sys.viewDetails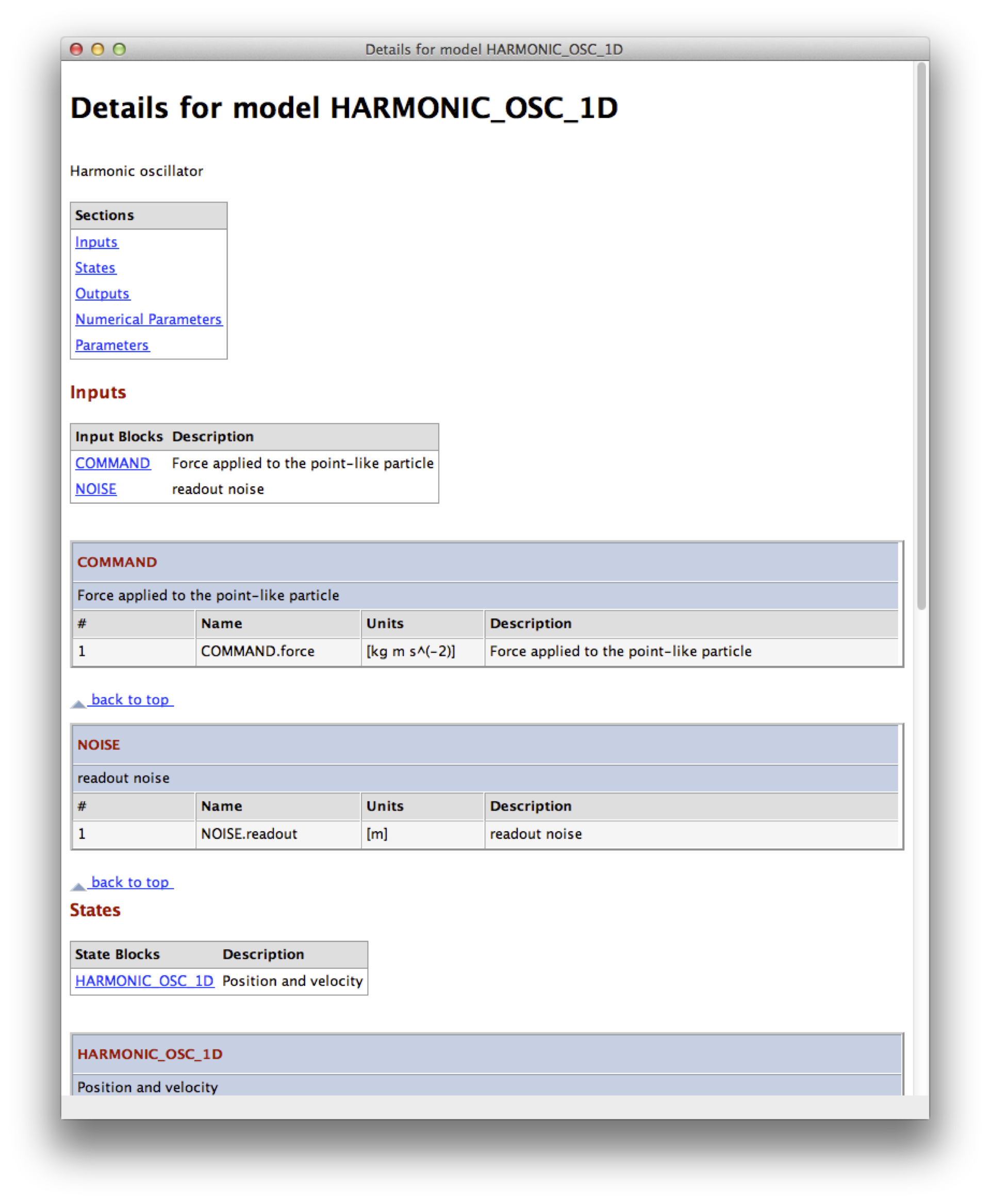
If you build multiple ssm objects, you can assemble them together using the ssm/assemble method. Although we don't need to do that in this training session, it may be useful to know the rules in case you want to build your own models, and because the LPF models we will be using are built in this way, assembling simpler subsystems. Essentially, if you ask LTPDA to assemble 2 or more models, then it will look for matching input and output blocks and connect them together. Here, matching means that the input block name matches the output block name, and that they both have the same number of ports. The ports are then connected in numerical order. The inputs of any block which gets connected to an output block will not appear in the final composite model.
Once you have built your ssm model in LTPDA, you can go on and use it in various ways. The most common ways are to produce transfer functions (using ssm/bode) responses of the system or to simulate the time-domain system response to different inputs (using ssm/simulate). Both of these topics will be covered in later sections.
| |
Topic 2 - Simulating LPF noise in LTPDA. | Introduction to the LPF state-space models in LTPDA | |
©LTP Team